Sistem kendali adalah proses pengaturan/pengendalian terhadap satu atau beberapa besaran (variable, parameter) sehingga berada pada suatu rangkuman harga tertentu. Ditinjau dari segi peralatan, sistem kendali terdiri atas berbagai susunan komponen fisis yang digunakan untuk mengarahkan aliran energi ke suatu mesin atau proses agar dapat menghasilkan prestasi yang diinginkan. Tujuan utama sistem kendali adalah mendapatkan optimasi yang diperoleh dari fungsi sistem kendali itu sendiri, yaitu: pengukuran (measurement), membandingkan (comparison), pencatatan dan perhitungan (computation), serta perbaikan (correction).
Secara umum sistem kendali dapat dikelompokkan menjadi:
a. Manual dan otomatis,
b. Lup tertutup (closed-loop) dan lup terbuka (open-loop),
c. Kontinyu (analog) dan diskrit (digital),
d. Servo dan regulator,
e. Menurut sumber penggerak: elektris, pneumatis (udara), hidraulis (zalir), dan mekanis.
Manual dan Otomatis
Pengendalian secara manual adalah pengendalian yang dilakukan oleh manusia yang bertindak sebagai operator. Pengendalian secara manual banyak ditemukan dalam kehidupan sehari-hari seperti pada aliran air melalui keran, hidup-matikan lampu, televisi, radio, dan sebagainya. Sedangkan pengendalian secara otomatis adalah pengendalian yang dilakukan oleh mesin-mesin/peralatan yang bekerja secara otomatis dan operasinya di bawah pengawasan manusia. Pengendalian secara otomatis banyak ditemukan dalam proses industri, pengendalian pesawat, pembangkit tenaga listrik, dan sebagainya.
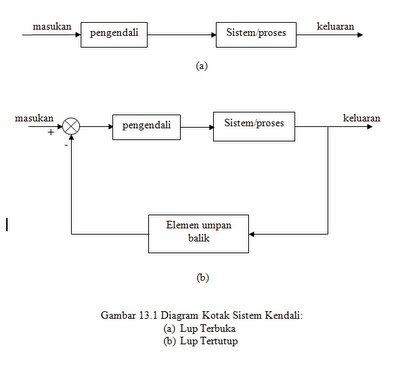
Lup Tertutup dan Lup Terbuka
Sistem kendali lup tertutup adalah sistem pengendalian di mana besaran keluaran memberikan efek terhadap besaran masukan sehingga besaran yang dikendalikan dapat dibandingkan terhadap harga yang diinginkan melalui alat pencatat (indikator atau recorder), selanjutnya perbedaan harga yang terjadi antara besaran yang dikendalikan dan penunjukan alat pencatat digunakan sebagai koreksi yang pada gilirannya akan merupakan sasaran pengendalian. Sistem kendali lup terbuka adalah sistem pengendalian di mana keluaran tidak memberikan efek terhadap besaran masukan, sehingga variabel yang dikendalikan tidak dapat dibandingkan terhadap harga yang diinginkan. Perbedaan kedua jenis sistem kendali tersebut dapat dilihat pada diagram kotak berikut ini (Gambar 13.1a dan b):
Kontinyu (analog)
Pengendalian jenis analog ini dapat dibagi menjadi:
a. Kesebandingan (proportional)(P), yaitu sistem kendali yang mempunyai keluaran sebanding dengan penyimpangan (deviasi), contoh: pengendalian uap melalui katup, transmitter tekanan, dan lain-lain.
b. Integral (I), yaitu sistem kendali yang keluarannya selalu berubah selama terjadi penyimpangan, dan kecepatan perubahan keluaran tersebut sebanding dengan penyimpangan (proportional speed floating control), contoh: aras cairan di dalam tangki, sistem tekanan gas.
c. Diferensial (D).
d. Kombinasi P, I, dan D.
Diskrit (digital)
Pengendalian ini dilakukan oleh komponen-komponen diskrit dan dapat dibagi atas:
a. Pengendalian dengan dua posisi (bang-bang control), misalnya: rele, saklar On-Off, termostat, dan lain-lain, pengendalian jenis ini bersifat osilasi.
b. Posisi ganda, misalnya saklar pemilih (selector switching). Keuntungannya mengurangi osilasi. c. Floating: pada posisi yang relatif tidak terbatas. Pada jenis ini pemindahan energi dapat dilakukan melalui salah satu dari beberapa kemungkinan yang ada.
Servo dan Regulator Sebuah regulator adalah bentuk lain daripada servo, perbedaan utama antara servo dengan regulator adalah pada regulator diberi sinyal tambahan (sinyal gangguan, u) sehingga akan menghasilkan keluaran yang berbeda dengan servo. Perbedaan tersebut digambarkan secara sederhana pada Gambar 13.2a dan Gambar 13.2b. Istilah regulator diperoleh dari pemakaiannya mula-mula sebagai pengendali kecepatan dan tegangan, yaitu sebagai pengatur tegangan atau pengatur kecepatan


Karakteristik Sistem Kendali Otomatis
Suatu sistem kendali disebut kendali otomatis apabial sistem tersebut merupakan lup tertutup dan cara pengendalian variabel dilakukan dengan peralatan-peralatan otomatis berupa peralatan elektris, pneumatis, mekanis, ataupun kombinasinya. Berdasarkan hal tersebut, karakteristik penting sistem kendali otomatis adalah sebagai berikut:
a. Sistem kendali otomatis merupakan sistem kendali dinamis (berubah terhadap waktu) yang dapat berbentuk linier maupun nonlinier.
b. Bersifat menerima informasi, memprosesnya, mengolahnya, dan kemudian mengembangkannya.
c. Komponen/unit yang membentuk sistem kendali ini akan saling mempengaruhi (berinteraksi). d. Bersifat mengembalikan sinyal ke bagian masukan (feedback) dan ini digunakan untuk memperbaiki sifat sistem.
e. Karena adanya sistem umpan balik, maka pada sistem kendali otomatis selalu terjadi masalah kestabilan.
Pemakaian Sistem Kendali Otomatis
Pemakaian sistem kendali otomatis banyak ditemui dalam kehidupan sehari-hari baik dalam pemakaian langsung maupun tidak langsung,
pemakaian tersebut dapat dikelompokkan menjadi:
a. Pengendalian proses: suhu, aliran, tekanan, tinggi permukaan cairan, viskositas, dan lain-lain; misalnya pada industri kimia, makanan, tekstil, dsb.
b. Pembangkit tenaga listrik (pengendalian distribusi tenaga).
c. Pengendalian numeris (CNC): pengendalian yang membutuhkan ketelitian tinggi dalam proses yang berulang-ulang.
d. Transportasi; elevator, eskalator, pesawat terbang, dsb.
e. Servomekanis.
f. Bidang non teknis, seperti: ekonomi, sosiologi, dan biologi.
sumber: http://supriyatnos.blogspot.co.id/2010/11/sistem-kendali.html
No comments:
Post a Comment